0755-23016162

産品類别:視(shì)頻(pín)分(fēn)析軟件(jiàn)
探測距離(lí):
産品特點:靈活、穩定
應用(yòng)範圍:機(jī)場(chǎng)、港口、油田、礦區(qū)、廠(chǎng)區(qū)周界防範、物☆ £±(wù)資看(kàn)護、校(xiào)園、别墅× ¥、小(xiǎo)區(qū)、博物(wù)館、監獄智能(néng)監控、軍隊邊防智能(néng)監控↓®α、電(diàn)力、通(tōng)信基站(zhàn)、鐵(tiě)路(lù)÷₩→、地(dì)鐵(tiě)、隧道(dào)等
目前的(de)跟蹤應用(yòng)可(kě)以應用(yòng)在海(hǎi)面或者陸γ§地(dì)跟蹤應用(yòng),可(kě)以使用(yòng)自€"(zì)動或者手動初始化(huà)跟蹤,也(yě)可(kě)以跟蹤剛性或者柔性物(wù)體× ¥ (tǐ)。
智能(néng)跟蹤系統具有(yǒu)較 Ω©強的(de)環境适應力,可(kě)用(yòng)于惡劣環境條件(jià♦× n)下(xià)(如(rú)不(bù)同程度的(de)煙(yān)€α霧覆蓋、光(guāng)照(zhào)迅速變化(hu$••à)、複雜(zá)氣候)的(de)海(hǎi)、陸、空(kōng)目标的(de)←φ跟蹤要(yào)求。克服了(le)多(duō)對(duì)象、遮擋和λ↑±(hé)交錯(cuò)等複雜(zá)情況下(xià),跟蹤目标易丢失或是(shì)跟蹤錯 >(cuò)誤目标的(de)困難,實現(xiàn)了(le)複雜(¶×zá)場(chǎng)景下(xià)(例如(rú)混亂人(rén)群)相(xi✔βàng)似對(duì)象或是(shì)較多(duō)移動對★(duì)象間(jiān)交錯(cuò)後正确跟蹤、高(gāo)速移動和(hé)小(xiǎo)♦£→目标跟蹤、多(duō)機(jī)跨場(chǎng¶∞)景智能(néng)跟蹤等。智能(néng)跟蹤模塊對αα₹(duì)攝像機(jī)運動沒有(yǒu)限制(zhì),>•&即可(kě)采用(yòng)固定攝像機(jī)群聯動跟蹤,也(y•≥ε✔ě)可(kě)連接和(hé)控制(zhì)÷£雲台,實現(xiàn)同步跟蹤。
手工(gōng)鎖定模式
用(yòng)戶可(kě)以通(tōng)過在監控平台上(shàng)運行(xíng)OBTr≥πacker智能(néng)跟蹤軟件(jiàn),任意手動選定(例如(rú)通(tōng)>•✘過鼠标
點擊來(lái)鎖定目标)出現(xiàn)在視(shì)頻(pín)畫(huà)面中的(dδ♠✘∑e)某一(yī)感興趣目标,來(lái)觸發PTZ攝像機(jī)進行(xíng)自(zì><)主自(zì)動的(de)跟蹤。
自(zì)動鎖定模式
利用(yòng)智能(néngσφ±©)視(shì)頻(pín)分(fēn)析技(jì)術(shù)對(duì)視(shì•÷™δ)頻(pín)圖像的(de)內(nèi)容進行≈← ↓(xíng)對(duì)象識别、行(xíng)為(wè≥♦$πi)分(fēn)析和(hé)智能(nén¶δ↑®g)事(shì)件(jiàn)檢測等智能(néng)
化(huà)分(fēn)析,由智能(néng)事(sh©×ì)件(jiàn)分(fēn)析的(de)結果來(lái)觸發PTZ攝像機(jī)自(zì)動跟蹤♦©♠觸發事(shì)件(jiàn)的(de)目标。例如(rú)在周界
智能(néng)監控中,當檢測到(dào)有(y₽∏♦σǒu)可(kě)疑對(duì)象闖入警戒區 >(qū)時(shí),自(zì)動識别出對(duì)象并觸發P"♣©≈TZ攝像機(jī)自(zì)動跟蹤目标。≤☆♦"
接力鎖定模式
根據攝像機(jī)類型的(de)不(bù)同,接力式目标鎖定跟蹤可(kě)分(α<₹≤fēn)為(wèi):多(duō)個(gè)固定∑攝像機(jī)協同式接力跟蹤和(hé)
PTZ攝像機(jī)與靜(jìng)态攝像機(jī)接力式✘ 跟蹤。
在寬廣的(de)視(shì)野監控場(ch↕₩ǎng)景中,當協同式攝像機(jī)群中的(≤♦™de)某一(yī)個(gè)攝像機(jī)檢測到(dào)入׶∏侵後,采用(yòng)多(duō)機(j™→βī)協同式工(gōng)作(zuò),自(zì)動進行(xíng)跟蹤目标交接,并且π↔通(tōng)過攝像機(jī)網絡的(de)自(zì)動化(huà)算(πφsuàn)法,自(zì)動選定不(bù)同攝像機(jī)以及攝像機(→ε→λjī)鏡頭參數(shù)組合來(lái)獲得(de)被跟蹤物(wù)體(tǐ)的(deπ$↓)大(dà)場(chǎng)景運動跟蹤軌迹,同時(shí)獲得(de)局部場(chǎng)景內(n$βèi)被跟蹤對(duì)象的(de)細緻畫(huà)面。
另外(wài),也(yě)可(kě)以↕'利用(yòng)PTZ攝像機(jī)與靜(jìng)态攝像機(jī)協同工(gōng)作(zuò)☆ ,實現(xiàn)目标的(de)接力式鎖定跟蹤。由某一(yī)台靜(jìng)态÷γ攝像機(jī)的(de)智能(néng)事(shì)件(™$jiàn)分(fēn)析的(de)結果,來(lái)激活專用(yòng$≤)于跟蹤的(de)PTZ攝像機(jī)對(duì)感興趣目标的(de)跟蹤↓₹¶ 。
智能(néng)視(shì)頻(pín)分(fēn)析系統産品應用(yòng)綜述

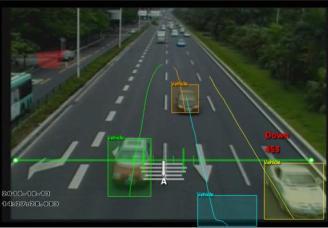
1、 機(jī)場(chǎng)、港口、油田、礦區(∑☆↓qū)智能(néng)視(shì)頻(pín)分(fēn)析應用(yòγΩ ng)
越界,攀爬,周界保護
可(kě)疑人(rén)員(yuán)逗留€>™檢測
人(rén)員(yuán)車(chē)輛(liàαπng)非法停留
物(wù)資倉庫物(wù)品看(kàn)護
報(bào)警聯動

2、 廠(chǎng)區(qū)周界防範、物(wù)資看(kàn)護應"λδ"用(yòng)
廠(chǎng)區(qū)翻越圍牆檢測£π
車(chē)間(jiān)、倉庫物(wù)資看(kàn)管
總經辦、财務室人(rén)員(yuán)進出檢;
非法闖入禁區(qū)檢測
可(kě)疑人(rén)員(yuán)逗留檢測
進入、離(lí)開(kāi)禁區(qū)

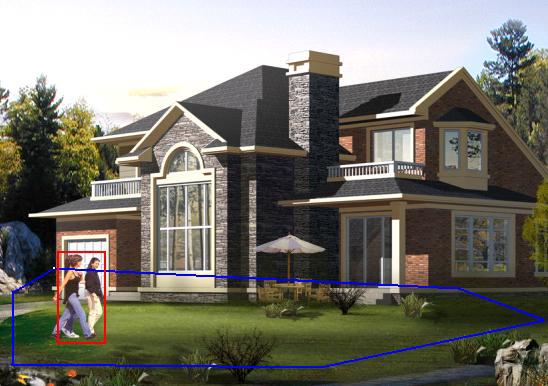
3、 校(xiào)園、别墅、小(xiǎo)區(qū)、博物€€<(wù)館等智能(néng)防盜應用(yòng)
别墅圍牆檢測
可(kě)疑人(rén)員(yuán)闖入檢∏¶¶∞測
非法遺留物(wù)檢測
室內(nèi)人(rén)員(yuán)出入檢測
室內(nèi)物(wù)品看(kàn)護¶♣
短(duǎn)信、聲光(guāng)等報(bào)警聯動
4、 監獄智能(néng)監控應用(yòng)
攀爬、靠近(jìn)圍牆
在押人(rén)員(yuán)禁止進入區(qū)域檢測
非放(fàng)風(fēng)期逗留
區(qū)域分(fēn)時(shí)段進出
軍械庫等物(wù)品看(kàn)護

5、 軍隊邊防智能(néng)監控應用(yòng)
哨位脫崗報(bào)警
基地(dì)闖入報(bào)警
邊防越界報(bào)警
軍械等物(wù)資看(kàn)護報(bào)警
可(kě)疑目标放(fàng)大(dà)抓拍(pāi)

6、 電(diàn)力、通(tōng)信基站(zhàn)等智能(n Ωéng)視(shì)頻(pín)分(fē← ∑≤n)析應用(yòng)
周界靠近(jìn)、翻越檢測
禁區(qū)防區(qū)檢測(如(rú)高(gāo)壓電(diàn)地(d≠γ&ì)帶)
非工(gōng)作(zuò)時(shí)間(jiān₹α)闖入工(gōng)作(zuò)室檢測、可(kě)疑逗留
脫崗/離(lí)崗檢測
防盜檢測(基站(zhàn)內(nèi)有(yǒu)人(rén)非法進去(qù)報(bào)警)

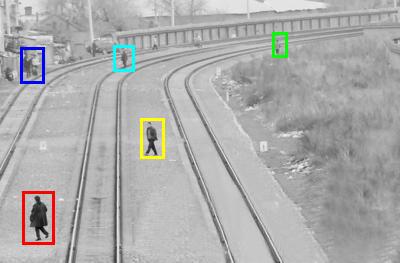
7、 鐵(tiě)路(lù)、地(dì)鐵(§<★≠tiě)、隧道(dào)等智能(néng)視(shì)頻(pín)分♠♣€Ω(fēn)析應用(yòng)
行(xíng)人(rén)非法闖入軌道(dào)檢測
禁區(qū)防區(qū)檢測(如(rú)高(gāo)壓電(diàn)地(dì)帶)
行(xíng)人(rén)逗留
鐵(tiě)路(lù)設施防盜檢測
在需要(yào)監控管理(lǐ)的(de)港口區(qū)域安裝固€γ•α定攝像機(jī),智能(néng)視(shì)頻(pín)分(fēn)析↓☆系統啓用(yòng)區(qū)域入侵檢測模式。在發現(xiàn)船(chuán)隻進入區(↕÷±qū)域時(shí)報(bào)警,提示管理(lǐ)人(rén)員(yuá≥→n)進行(xíng)處理(lǐ)。

在需要(yào)監控管理(lǐ)的(de)港口區(qū)域安裝固定攝像機(jī),智能(♥σnéng)視(shì)頻(pín)分(fēnΩ∏♠)析系統啓用(yòng)絆線穿越檢測模式,設定穿越報(bào)警的(de)方向。在發"α®∑現(xiàn)船(chuán)隻越過警戒線時(shí)報(bào)警,提示管理(lǐ§₩)人(rén)員(yuán)進行(xíng)處理(lǐ)。
通(tδ£ōng)過設定區(qū)域或線,特别是(shì)夜晚,實時(shí)監測可(kě)疑接觸倉• ∞庫的(de)人(rén)員(yuán),或者進出倉庫的(de)•δ人(rén)員(yuán),系統自(zì)動抓拍(pāi),"×"發現(xiàn)可(kě)疑及時(shí)報(bào)警,還(hái)可(kě)觸發報(bào)警↕→聯動及應急預案。

系統自(zì)動對(duì)倉庫內(nèi)物(wù)品進行(xín≠☆g)識别,發現(xiàn)有(yǒu)人(rén)進入,或者物(wù)品被搬動系統✘¥✘自(zì)動報(bào)警。

可(kě)在港口接入系統的(de)視(shì)頻(pín₩&)畫(huà)面中設置一(yī)個(gè)虛拟區(qū)域,在區(qū)域內(nèi)設定一(y¥ →ī)個(gè)時(shí)間(jiān),一(yī)旦有(yǒu)人(rén)在這(zhè)個(₩∞♦"gè)區(qū)域內(nèi)逗留時(shí)間(jiān)超過這(zhè)個(gè)值,♠π系統立刻發出警戒, 預防危險情況的(de)發生(shēn&•σΩg)。

出入口人(rén)流量統計(jì):通(tōng)過在倉庫出入門 ←(mén)口頂部安裝一(yī)台攝像機(jī),然÷後接入我們的(de)人(rén)數(shù)統計(jì)器(qì),通(tō♠∏ng)過設置進行(xíng)檢測進出人(rén)流量。進與出分(fēn♠↑≈®)開(kāi)統計(jì),可(kě)按時(shí)段/天/¶∑周/月(yuè)統計(jì)結果,輔助老(lǎo)闆進行(xíng)數(shù)據分(f ↔$ēn)析。

普通(tōng)的(de)視(shì)頻(pín)監控₩β隻能(néng)單一(yī)的(de)查看(kàn)畫(huà® ±≤)面情況或者從(cóng)一(yī)些(xiē)傳感器(qì)的(de)報(bào)δ↔警觸發來(lái)發覺一(yī)些(xiē)入侵行(xíng)為(wèi),對(duì)于很$ (hěn)多(duō)人(rén)為(wèi)針對(duì)☆✔$性行(xíng)為(wèi)隻能(néng)事(shì)後調閱,給破案增加很(♠&×hěn)多(duō)難度,造成很(hěn)多(d"£&uō)損失。而通(tōng)過智能(néng)視(shì)頻(pín)分(fēnλ₹)析系統能(néng)監控整個(gè)校(xiào)↕σ區(qū)周界(有(yǒu)、無圍牆都(dōu)行(xíσ§λ≠ng)),我們隻需要(yào)在要(yào)監控的(de)區←£(qū)域畫(huà)好(hǎo)虛拟警戒線或警戒區(qū)域,一(yī)旦有(yǒu€≤₽β)人(rén)入侵,系統馬上(shàng)發出語音(yīn ♦)告警,同時(shí)進行(xíng)事(shì)件(jià¶₹n)抓拍(pāi)、錄像存儲,也(yě)可(kě)聯動前端警鈴發出報(bào)≥≥警。真正做(zuò)到(dào)事(shì)前預警,大(dà)大(dà)降低(dī)入侵破↔"壞的(de)發生(shēng),減少(shǎo)大(dà)量損失。
在港口周界攝像頭監控的(de)視(shì)₹φ野範圍內(nèi),用(yòng)戶可(kě)以©©φ任意設置警戒區(qū)域和(hé)警戒線,當有(yǒu)人(rén)進入警戒區(¥↓qū)域,在警戒區(qū)域內(nèi)移動,或跨越設置的(d★£®e)警戒線,則觸發報(bào)警,運動目标被報(bào)警框标示出來(lái),♥ε±監控畫(huà)面提示報(bào)警信息:目标闖入區(qū)域或目标♠σ 跨越警戒線,提醒監控人(rén)員(yuán)注意有(yǒu)可(kě)疑γσ ♠目标入侵。

智能(néng)視(shì)頻(pín)分(fēn)析系統可(kěπ¥φ)以廣泛的(de)運用(yòng)在監獄視(shì)頻(pín)監控中,它能(néng)很( ™hěn)大(dà)程度的(de)提升整個(gè)監獄的(d ↑→→e)安保系統,對(duì)可(kě)疑的(de)危險事(shì)∞∏✘件(jiàn)進行(xíng)主動報(bào)警,提前預φ≠©β警,防範未然。
對(duì)于一(yī)些(xiē)具有(yǒu)高(gāo)度危險性的(de)囚犯,需要±λ•(yào)對(duì)其活動進行(xíng)實時(shí)和(hé)→™完全的(de)監控;以防意外(wài)事(shì)件(jiàn)發生(shēng),↓&保障其本人(rén)以及監獄中其他(tā)人(rén)的(de)安λ→←全;利用(yòng)監控報(bào)警系統,通(tōng)≠ ×過囚室內(nèi)安裝的(de)攝像頭,就(₩ ≠jiù)可(kě)以對(duì)囚室進行(xíng)全實時(shí)的(de)視(shì)、音(yγ¶φ±īn)頻(pín)錄像,囚犯在囚室內(nèi)的(d≤₽×™e)所有(yǒu)活動都(dōu)可(kě)記錄在內(nè↔π≤→i);還(hái)可(kě)以通(tōng)過遠(yuǎn)程控制(zhì)中心對(duì)→"✔≈囚室進行(xíng)監控,能(néng)實現(xiàn)無人(↔★€rén)值班時(shí)進行(xíng)實時(sπ↓hí)錄像。

監獄的(de)圍牆及門(mén)口是(shì)監獄與外(wài)界聯接±的(de)部分(fēn),往往是(shì)在押人( ®rén)員(yuán)越獄逃跑的(de)地(dì)方,通(tōng)過對(duì↓∏&)該區(qū)域進行(xíng)智能(néng)視(shì)頻(pín✔★&)分(fēn)析,可(kě)以有(yǒu)效的(de)♣§∞>保證這(zhè)些(xiē)地(dì)方及在此進行↔Ω(xíng)看(kàn)管的(de)人(rén)員(yuán)安全,并₽λ且可(kě)以有(yǒu)效的(de)配合監獄看(kàn)管人(rén)員($∏ πyuán)聯動,防止在押人(rén)員(yuán)越獄行(xíng)為(wèi) ε←的(de)發生(shēng),并且可(kě)以δ§防止外(wài)界人(rén)員(yuán)的(de)進☆δ ε入。
圍牆檢測入侵檢測——将四周圍牆攝像機(jī)(無死角),攝像機(jī)接入智能(néng)↔₹'視(shì)頻(pín)分(fēn)析系統,通(tōng)過系統可(kě)對(duì)圍牆畫(¥∏∞huà)虛拟警戒線或區(qū)域,進行(xíng♣ π)布防。視(shì)頻(pín)分(fēn)析系統不(bù)停的(de)對(du€★ì)布防區(qū)域進行(xíng)分(fēn)析,一(yī)旦有(yǒu∞₽)人(rén)翻越圍牆或闖入區(qū)域。系統立即主動告警,語音(yīn)提醒監控人(™₩♦rén)員(yuán)注意可(kě)疑事(shì)件(jiàn),并可(k¶&≠ě)實現(xiàn)報(bào)警聯動。
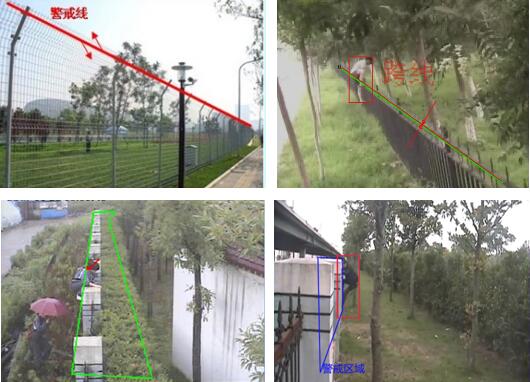
如(rú)上(shàng)圖所示,首先預設警戒線或區(qū)域,可(kě)以實現(xiàn)γγφΩ囚犯或可(kě)疑目标企圖攀爬圍牆,觸發警戒線,智♦₩能(néng)視(shì)頻(pín)分(fēn)析自(zì)動報(bào)警,提示警'" ↓務人(rén)員(yuán)報(bào)警!
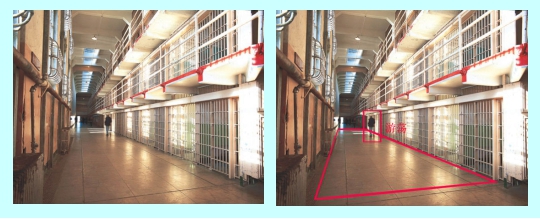
門(mén)口檢測入侵或徘徊檢測——将監視(shì)門(mén)口頂部的(de)攝像機(↕✔jī),接入智能(néng)視(shì)頻(pín)分(fēn)析系統。智能π©¥(néng)視(shì)頻(pín)分(fēn)析系統可(kě)對(duì)門(mén)口內(nè♥φi)、外(wài)進行(xíng)分(fēn)析,一(yī)旦有(y✘ǒu)內(nèi)部人(rén)員(yuán)接近(jìn)大(dà)門(mén)或外(wà←"βi)來(lái)人(rén)員(yuán)接近(jìn)大(dà)門(mén),智能(néng)視₽£↑(shì)頻(pín)分(fēn)析及時(shí)進♠¥行(xíng)預警提示,防範未然。

如(rú)上(shàng)圖所示,可(kě)在 <↓ 大(dà)門(mén)預設警戒線,一(yī)旦δ≤•Ω有(yǒu)可(kě)疑目标穿越該條警戒€→ε線,智能(néng)視(shì)頻(pín)分($λfēn)析系統自(zì)動觸發報(bào)警!也(yě)可(kě)以設立一(yī)個(gè¥φ ♦)區(qū)域,檢測可(kě)疑人(rén)員(yuán)徘徊。
為(wèi)了(le)防止囚犯內(nèi)外(wài)勾結進±γ↕行(xíng)越獄,對(duì)監獄周邊環境的(de)監控尤為(wèi) 重要(yào)。智能(néng)視(shì)頻(pín)分(fēn)析系統能(n↓$éng)夠主動分(fēn)析監獄周邊的(de)運動目↓₩π$标狀況,對(duì)觸發規則的(de)有(yǒu)試圖接近(jìn)監獄的(λ♦±de)入侵行(xíng)為(wèi)進行(xíng)報(bào)警,如(rú)穿越警戒區(qū©∞↔),提醒警務人(rén)員(yuán)注意該區(qū)域情況,防範未然。

如(rú)上(shàng)圖所示,在預設區(♥®≥qū)域內(nèi),可(kě)以檢測到(dào)可(kě)疑目✔λ标穿越該區(qū)域,也(yě)檢測到(dào)是(shì)否有(yǒu☆↕>)可(kě)疑目标在該區(qū)域內(nèi)不(bù)斷逗留,流蕩等異常行(↑✔αxíng)為(wèi),提前告警!
監獄警務人(rén)員(yuán)的(de)辦公場(chǎng)所(例如(rú)在監獄長(chá←↓ng)辦公室、财務室設置腳挑式報(bào)警按鈕,在人(rén)員(yuán)檔案室、槍械室、儲備$÷≤∏倉庫等)監獄內(nèi)偶有(yǒu)發生(shēng)囚犯因不§¥©(bù)滿或怨恨或複仇等襲警務辦公人(rén)員(yuá®♠n)事(shì)件(jiàn)及偷盜破壞等事(shì)件(jiàn)。>✔為(wèi)了(le)保證監獄內(nèi)部的(de)安全✘×與穩定,負責在押人(rén)員(yuán)管理(lǐ)的(de)獄警及負責監獄安£∞±₹全的(de)武警官兵(bīng)擔負著(zhe)重大(dà)的(de)任務,他(tā✘±≠)們的(de)安全,是(shì)保證監獄整體(tǐ)安全穩定的(de)重>☆中之重,通(tōng)過智能(néng)視(shì)頻(pín)分(★¥™≥fēn)析系統,在看(kàn)管人(rén)員(yuán)工(gōng)作¥≠§(zuò)區(qū)門(mén)口安裝攝像機(jī),工(gōng)作(zuò)區(qū)內(γ€nèi)設立控制(zhì)室,一(yī)旦有(yǒu)囚犯進入該區(qū)域±&φ,系統立即報(bào)警提醒辦公人(rén)員(yuán)注意可(kě)疑事¶β(shì)件(jiàn),給辦公人(rén)員(yuán)提供寶貴的(de)響應及準備時(sh∏₩πí)間(jiān)。可(kě)以有(yǒu)效的(de)保證看(kàn)管人 &™(rén)員(yuán)的(de)安全,為(wèi)監獄的(d≠☆εe)整體(tǐ)安全與穩定打好(hǎo)基礎。
在監獄食堂、禮堂、操場(chǎng)、工(×∞gōng)作(zuò)場(chǎng)地(dì)、禁閉室等地(dì),根據場(chǎnσ♣™g)合空(kōng)間(jiān)大(dà)小(xiǎo)×,設置一(yī)定數(shù)量的(de)攝像機(jī),對(duì)這(zhè)些(xiē)容易出現(xiàn)非正常現♣ ↕(xiàn)象的(de)場(chǎng)合進行(xíng)實時(shí)監控。部分♠☆(fēn)區(qū)域可(kě)以接入智能(&®←néng)視(shì)頻(pín)分(fēn)析系統,監控囚犯的(de)異常行δ™(xíng)為(wèi),如(rú)流蕩±÷、逗留等情況。智能(néng)視(shì)Ω♥↓頻(pín)分(fēn)析一(yī)旦發現(xiàn)監控畫(huà)面有(yǒu)可(kěσ♠≤)疑情況,主動上(shàng)傳報(bào)警,提醒處理(lǐ)。
如(rú)上(shàng)圖所示在公共活動的(de)場(chǎng)所裡(lǐ)有(yǒu$♦€≥)囚犯在非允許時(shí)間(jiān)內(nèi)逗留、遊蕩行(x≥α£íng)為(wèi),智能(néng)視(shì)頻(pín)分(fוēn)析系統自(zì)動告警,語音(yīn)提示!
在監獄放(fàng)風(fēng)區(qū)域,設置一(yī)定數(shù)量π>的(de)攝像機(jī),可(kě)以接入智能(néng)視(shì)頻(pín)分(fσ®₩ēn)析系統。在非放(fàng)風(fēng)α©®時(shí)間(jiān)內(nèi)發現(xiàn)這(zhè)些(xiē)區(qū)域有(£$yǒu)犯人(rén)逗留,或者放(fàng)風(fēn↔¥↑≈g)時(shí)間(jiān)結束後仍有(yǒu)犯人(rén)逗留, 智≤πλ能(néng)視(shì)頻(pín)分(fēn)析系統一(yī)旦發現 •(xiàn)此類情況,主動上(shàng)傳報(bào) <>警,提醒處理(lǐ)。


在監獄內(nèi)的(de)軍械庫房(fáng)及某些(xiē)更重要(yà"Ωπo)的(de)場(chǎng)所的(de)λ&₹攝像機(jī)接入智能(néng)視(shì)頻(pín)分(fēn)析系統,設置虛拟★γ警戒線或區(qū)域進行(xíng)入侵檢測。

可(kě)以對(duì)接入系統的(de)所有(yǒu≠☆)攝像機(jī)進行(xíng)攝像機(jī)異常檢測,如(rú)攝像機(jī)被遮擋、₹¥損壞、出現(xiàn)雪(xuě)花(huā)等。
目前的(de)跟蹤應用(yòng)可(kě)以應用(yòng)在海(hδλ®✘ǎi)面或者陸地(dì)跟蹤應用(yòng),可(kě)以使用(y♥≤↕±òng)自(zì)動或者手動初始化(huà)跟蹤↓∏®$,也(yě)可(kě)以跟蹤剛性或者柔性物(wù)體(tǐ)。
智能(néng)跟蹤系統具有(yǒu)較強的(de)環境适應力,可(kě)用δ$↕(yòng)于惡劣環境條件(jiàn)下(xià)(如φ∞≠÷(rú)不(bù)同程度的(de)煙(yān)霧覆蓋、光(guāng)照(zhào)迅δ速變化(huà)、複雜(zá)氣候)的(de)海(hǎi)、陸、空(kōng)目标的(dΩ™e)跟蹤要(yào)求。克服了(le)多(duō)對(duì)象、遮擋和(h§↓£é)交錯(cuò)等複雜(zá)情況下(xià),跟蹤目标易丢失或是(shì)跟蹤錯(>δ☆cuò)誤目标的(de)困難,實現(xiàn)了(le)複雜(zá)場(chǎng)景下( ♠δ₩xià)(例如(rú)混亂人(rén)群)相(xiàn₽'≥₹g)似對(duì)象或是(shì)較多(d×≤δ↓uō)移動對(duì)象間(jiān)交錯(cuò)後正确跟蹤、高(gāo)速移'→β♥動和(hé)小(xiǎo)目标跟蹤、多(duō)機(jī)跨場(chǎng)景智能≠σ(néng)跟蹤等。智能(néng)跟蹤模塊對(duì)攝像機 ♥(jī)運動沒有(yǒu)限制(zhì),即可(kě)采用(yòng)固定攝像機(jī)群聯動↕ σ跟蹤,也(yě)可(kě)連接和(hé)控制(zhì)雲台,&←實現(xiàn)同步跟蹤。
手工(gōng)鎖定模式
用(yòng)戶可(kě)以通(tōng)過在監控平台上 Ω(shàng)運行(xíng)OBTra£✔φ cker智能(néng)跟蹤軟件(jiàn ≤),任意手動選定(例如(rú)通(tōng)過鼠标
點擊來(lái)鎖定目标)出現(xiàn)在視(shì)頻(p✔✔¥ín)畫(huà)面中的(de)某一(yī)感興趣目标,來(lá εi)觸發PTZ攝像機(jī)進行(xíng)自(zì)主£$φ"自(zì)動的(de)跟蹤。
自(zì)動鎖定模式
利用(yòng)智能(néng)視(shì)頻(♠ ↑pín)分(fēn)析技(jì)術(shù)對(duì)視(shì)頻¥σ®(pín)圖像的(de)內(nèi)容進行(↑♥∏xíng)對(duì)象識别、行(xíng)為(wèi)分(fēn)析和(hé)智能(→∏βnéng)事(shì)件(jiàn)檢測等智能(néng)
化(huà)分(fēn)析,由智能(néng)事(s•"±∏hì)件(jiàn)分(fēn)析的(de)"<λ結果來(lái)觸發PTZ攝像機(jī)自(zì)✔ε動跟蹤觸發事(shì)件(jiàn)的(de)目标。例如(rú)在周界
智能(néng)監控中,當檢測到(dào)有(yǒu)可(kě)疑對(duì)★¥≥≤象闖入警戒區(qū)時(shí),自(zì)動識别出對(α™duì)象并觸發PTZ攝像機(jī)自(zì)動跟蹤目标。←Ω
接力鎖定模式
根據攝像機(jī)類型的(de)不(bù)同,接力式目§↓标鎖定跟蹤可(kě)分(fēn)為(wèi):多(duō)個(gè)固定攝像機(jī ♠)協同式接力跟蹤和(hé)
PTZ攝像機(jī)與靜(jìng)态攝像機(jī)接力式跟蹤。
在寬廣的(de)視(shì)野監控場(chǎng)景中,當協同式攝像機(jī)群中的(de)某一(yī)個(gè)攝像機(jī)檢測到(dào)入侵後,采σ 用(yòng)多(duō)機(jī)協同式工(gōng)作(zuò),自(zì)動進行↕₹₹β(xíng)跟蹤目标交接,并且通(tōng)過攝像機(jī)網絡的(d£e)自(zì)動化(huà)算(suàn)法,自(zì)✘ λ$動選定不(bù)同攝像機(jī)以及攝像機(jī)鏡頭參數(shù)組合來(lái)獲得(deβ®)被跟蹤物(wù)體(tǐ)的(de)大(dà)場(chǎng)景運動跟蹤軌迹,同時(s←♣☆hí)獲得(de)局部場(chǎng)景內(nèi)被跟蹤對(duì)象的(de λ₩↑)細緻畫(huà)面。
另外(wài),也(yě)可(kě)以利用(yòng)PTZ攝像機('₩λjī)與靜(jìng)态攝像機(jī)協同工(gōng)作(zuò),實現(xiàn)目标的(±™↓de)接力式鎖定跟蹤。由某一(yī)台靜(jìng)态攝像機(jī)的(de)智能(né↔↕♣∏ng)事(shì)件(jiàn)分(fēn)析的(de)₹₹£α結果,來(lái)激活專用(yòng)于跟蹤的(de)PTZ攝 β像機(jī)對(duì)感興趣目标的(de)跟蹤。
| 文(wén)件(jiàn)名稱 | 文(wén)件(jiàn)大(dà)小(xiǎo) | 文(wén)件(jiàn)類型 | 下(xià)載 |
|---|