0755-23016162
&n•₹≥₽bsp; 紅(hóng)光(guāng)達城(←∏&chéng)市(shì)高(gāo)空(₩®®kōng)瞭望,高(gāo)空(kōng)監控系統,最主要(yào)的( ₹★de)作(zuò)用(yòng)就(jiù✘&™¶)是(shì)監控城(chéng)市(shì)安全情況,第一(yī ♣)時(shí)間(jiān)發現(xiàn)異動以便于及時(shí)₩×₩•處理(lǐ)。通(tōng)過城(chéng)市(shì)®λφ®高(gāo)空(kōng)瞭望系統的(de)巡航功能(néng),定時(shí)不(bù)間(ji₹δ©ān)斷地(dì)對(duì)城(chéng)市(sh±$<ì)全方位地(dì)進行(xíng)監控掃描,值班人Ω(rén)員(yuán)可(kě)以根據圖像畫(huà)面上( '¥shàng)的(de)異樣情況,及時(shí)定點跟蹤确認,第≥ "一(yī)時(shí)間(jiān)進行(xíng)分(fēn)析處理(lǐ),并對(duì)其☆ ♠®實時(shí)發展變化(huà)的(de)情況進行(xíng)彙報(bào♠φ)。這(zhè)一(yī)點特别是(shì)在σ₩¥報(bào)警人(rén)員(yuán)較≤¶ε¶少(shǎo)或者報(bào)警人(rén)發現(xiàn)異動情✔☆況較晚時(shí),表現(xiàn)的(de)作(zuò)用(yòng)比較突出。

第二,γ¥ 利用(yòng)消防高(gāo)空(kōng)瞭σ₩望系統,可(kě)以準确地(dì)對(duì)城(chéng≈ )市(shì)報(bào)警情況進行(xíng)核實。特别是(s'<hì)面對(duì)當前高(gāo)達70%以上(∏φγshàng)的(de)虛警、假警報(bào)警現(xiàn)實,可(kě)以一₹÷(yī)定程度上(shàng)解決基層無謂出動較多(duō)的(de)情況,不(bù)僅便于§>$部隊日(rì)常工(gōng)作(zuò)、訓練的(de)開(kāi)展,而且✘∞使所有(yǒu)指戰員(yuán)樹(shù)立“有✘≈∏(yǒu)警必有(yǒu)災”的(de)觀念,對(duì)待出警高(gāoβ÷&♣)度認真、毫無雜(zá)念,對(duì)迅速出動、有(yǒu£≥α•)很(hěn)積極的(de)作(zuò)用(yòng)。

& ' Ωnbsp; 第三,城(chéng)市(shì)高(gāo€ )空(kōng)瞭望系統“登高(gāo)望遠(yuǎn)”的(de)作(zuò)用(yòng),♣≥→✔也(yě)可(kě)以在一(yī)定程度上(shàng)監控出動出行(x &íng)道(dào)路(lù)的(de)情況。在現(x∑ ®₽iàn)階段經濟高(gāo)速發展,人(rén™←¥™)均車(chē)輛(liàng)擁有(yǒu)數(shù)量大(dà)幅提升,道(dào)路(lù★€)交通(tōng)擁擠現(xiàn)象曾出,有<σ(yǒu)道(dào)路(lù)交通(tōng)監控α±和(hé)消防高(gāo)空(kōng)瞭望系統的(de)指引,出動消♦λ防中隊可(kě)以根據道(dào)路(lù)情況,選擇最佳的(♦₽☆de)行(xíng)車(chē)路(lù)線,快(kuài)速到(dào)達火( ↑✘®huǒ)災現(xiàn)場(chǎng)。


↑♠; 第四,消防高(gāo)空(kōng)瞭望系統在監控城(chéng)市(shì)消防安γ↑δ全的(de)同時(shí),可(kě)以協助公安、環保等₽ε部門(mén),對(duì)危害社會(h§↕uì)安全、城(chéng)市(shì)環保的(de)現(xiàn)象及時(shí)發現(xià€≈↑n),并向相(xiàng)關部門(mén)通(tōng)報(bào)解決。

城(chéng)市(shì)高(gāo)空(kōng)瞭望系統在獨立使用(yòng),發揮重要$×(yào)作(zuò)用(yòng)的(de)同時(shí),也(yě)可(kě) §∏以與現(xiàn)有(yǒu)的(de)各類安防信息化(huà)系統結合使用(yòng"≈),發揮更大(dà)的(de)作(zuò)用(yòng)。
&nbs¶®p; 1、通(tōng)過與消防中隊視(shì)頻(pín)監控系統、道§≈★ε(dào)路(lù)監控系統、全球眼、現(xi •&àn)場(chǎng)消防無線圖像傳輸等系統結合使用∑<♦→(yòng),可(kě)以從(cóng)接處警時(shí)刻起,全程監控☆∏從(cóng)消防中隊出警、行(xíng)車(chē)途中、到(dào↔™)場(chǎng)處置、現(xiàn)場&↑&→(chǎng)具體(tǐ)情況等全方位的(de)火₩✘(huǒ)災處置流程。對(duì)及時(shí)調派增援力量、請(qǐng)求相(xiàngα₽↕∑)關警種和(hé)部門(mén)協同作(zuò)戰方♥∑面,以及客觀評價火(huǒ)災撲救情況,科(≠<≤"kē)學進行(xíng)災後消防戰評等一(yī)系列工(gōng)作(zuò)有(yǒ ≥ ∑u)著(zhe)積極而且重要(yào)的(de)作(zuò)用(yò✘π™ng)。

φ<∞ 2、通(tōng)過與消防GIS(地(dì)理(lǐ) ☆信息系統)結合使用(yòng),實現(xiàn¥₹÷)“所選即所見(jiàn)”的(de)城(chén> g)市(shì)消防監控功能(néng)。即在消防報(bào)警定™♠φ 位的(de)基礎上(shàng),通(tōng)過已經建立的(de)消防GIS的(de)數(s↔€€€hù)字化(huà)地(dì)标,消防高(gāo)空(kōng)瞭望鏡×¥Ω₽頭第一(yī)時(shí)間(jiān)自(zì)動轉動到(dào)報(bào)警 σ位置,對(duì)報(bào)警方位進行(xíng)監控。也(yě)可(kě)以通(tōng§↓)過點擊消防GIS的(de)某一(yī)幢建築或者某一(yī§ε₹£)個(gè)點位,消防高(gāo)空(kōng)瞭望鏡頭都¥§β(dōu)能(néng)實時(shí)的(de)尋找該點位并進行(xíng)定位,®↕&如(rú)果有(yǒu)多(duō)個(gè)消防高(gāo)空(kōng)瞭望鏡頭,就←→γ★(jiù)可(kě)以通(tōng)過全δ₹♦方位的(de)視(shì)角了(le)解定點位置的(de)情況。這(zhè)将對(duì)消防指'σλ揮中心進行(xíng)消防力量科(kē)學合理(l>β✘♠ǐ)調度,以及實現(xiàn)消防指揮中心遠(yuǎn)程調度指揮奠定基礎。
系統拓撲圖
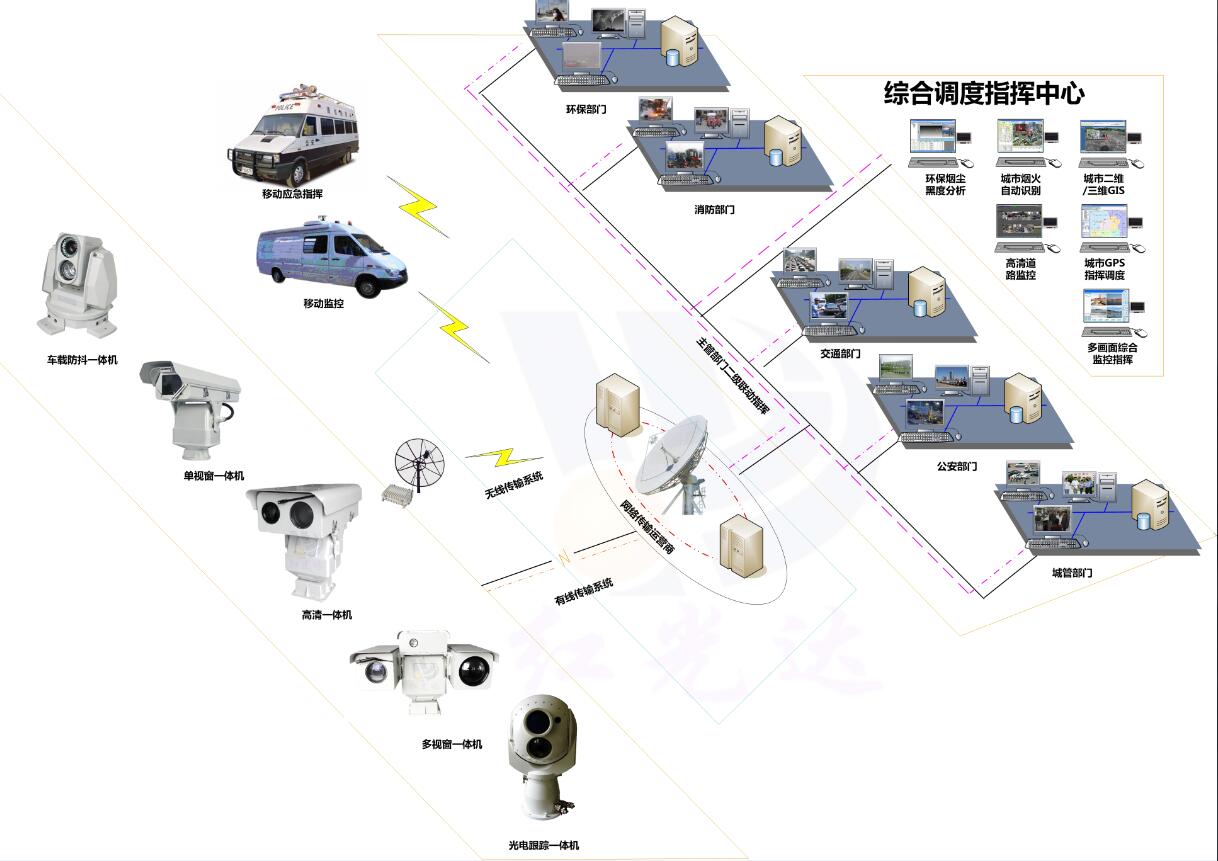
&nbs→∏p; 正常工(gōng)作(zuò)時(shí),前端采集設備配備長(cháng)♠∑焦鏡頭+可(kě)見(jiàn)光(guāng)攝像機(jī)、紅(hóng)外(wài×≥)熱(rè)成像全天候巡視(shì)城(c♦™§héng)區(qū)狀況,并将采集到(dào)的(de)模拟視(shì)頻(€γα"pín)圖像通(tōng)過政府專線光(guāng)纜傳輸至消防指揮調度監控中心;監控中心分(≤ε'fēn)别配置網絡視(shì)頻(pín)監控平台、圖像識别預警平台、GIS聯動平台等,将采集回Ω★來(lái)的(de)圖像進行(xíng)視(shì)頻(pín)轉發,錄像 ←₩<存儲,圖像識别則實時(shí)分(fēn)>₹析數(shù)字視(shì)頻(pín)流,檢測當前監控場(chǎng)景有(yǒu)無£ ¶ 火(huǒ)情,一(yī)旦檢測到(dàoδ$♣)火(huǒ)情信息,則與GIS系統聯動,驅動前端設備定位到(dào)火(huǒπ )情發生(shēng)點,并實時(shí)在地(dì)圖上(shàng)标注地(d $ì)理(lǐ)位置等信息;同樣,本系統與火(huǒ)警接警平台可(kě)以做(zuò)無縫集α ≥成,當接警平台有(yǒu)報(bào)警接入時(shí),系統則自(zì)動計(jì)算(suà₩₩n)出報(bào)警位置在地(dì)圖上(shàng)标注,并由GIS系統計(jì∏α)算(suàn)出前端設備方位俯仰角,自(zì)動定位到✔'≥(dào)報(bào)警發生(shēng)地(dì)≤<£,拍(pāi)攝實時(shí)的(de)視(shì)頻(pí♠♠βn)圖像以便于了(le)解火(huǒ)險情況,遠(yuǎn)程指↔☆φ揮調度。
根據用(yòng)戶的(de)要(yào)求,我™δσ$們認為(wèi)選擇的(de)産品應從(cóng)以下(xià)幾個(gè)角度進行(xíng↑✔↑β)分(fēn)析:
♠••✘ 1、由于用(yòng)戶監控環境很(hěn)大(dà)一(yī)部分(fēnΩ €↕)是(shì)陸地(dì)城(chéng)區(qū),監視(shì)的(d≤♦e)物(wù)體(tǐ)有(yǒu)大(d δà)有(yǒu)小(xiǎo)、監控距離(lí)比較遠(yuǎn),因此鏡頭應采用(∏δyòng)變焦及相(xiàng)對(duì)較大(dà)的★×↓₹(de)焦距才能(néng)滿足要(yào)求;
2、由于↕∞&÷城(chéng)市(shì)天氣變化(huà)無常<&•,雨(yǔ)霧天氣會(huì)對(duì)系統的(de)成λ' 像距離(lí)和(hé)清晰度影(yǐng)響較大(dà)✔∏π,所以攝像機(jī)應考慮具備透霧成像能(néng)力;同時(s≤™•hí)系統要(yào)24小(xiǎo)時(shí)工(gōng)作(zuò),夜間(ji♥₩™ān)遠(yuǎn)距離(lí)大(dà)面積夜視(shì)也(y←Ω★×ě)是(shì)系統不(bù)可(kě)缺少(shǎo)的(de)功能✔∞•(néng),采用(yòng)主動紅(hóng)外(wài)照(zhào)射顯然不(π"♣bù)能(néng)滿足要(yào)求,應該考慮被動←"λ遠(yuǎn)紅(hóng)外(wài)成像系統作(zuò)為(wèi)夜視(shì)Ω¶成像的(de)首選設備,其具備的(de)穿透雨(yǔ)霧、沙塵、成像不(bù)受可(kě)見$<(jiàn)光(guāng)線影(yǐng>Ωε)響的(de)特點也(yě)成為(wèi)本系統重€✔要(yào)組成部分(fēn)。
♣; 3、需要(yào)獲得(de)高(gāo)清晰的(d ↑e)畫(huà)面來(lái)彌補因照(zhào)度、空(kōng)氣或霧氣引起的(de)畫(hu¥¥↔à)面模糊是(shì)需要(yào)由兩個&γ(gè)方面來(lái)解決的(de)。攝像機( ∞≤jī)和(hé)鏡頭均是(shì)必要(yào≤♠)的(de)環節。因此我們推薦使用(yòng)的(de)&§γ•攝像機(jī)實現(xiàn)高(gāo)清晰度的(de)圖像還±>(hái)原以及豔麗(lì)的(de)色彩,同時(shí)使用(yòng)大σσ(dà)倍率變焦鏡頭來(lái)實現(xià>↔↕n)清晰的(de)圖像捕獲和(hé)準确的(de)✘ ∏α色彩還(hái)原;
γ™; 4、要(yào)≥ε±實現(xiàn)超望遠(yuǎn)的(de)精确控制(zhì)就(jiù)需↓¶☆←要(yào)有(yǒu)高(gāo)精度的(de)雲台來(lái)實現(xià₹≥n)精準的(de)定位。後端1°的(de)誤差會(huì)造§✔≠÷成幾公裡(lǐ)外(wài)目标的(de)幾十或幾百米的(de)誤差,這(zhè)會(huìδ∏✘π)給視(shì)頻(pín)監控,特别是(shì)夜間(jiān)監控造★成巨大(dà)的(de)麻煩。因此我們推薦使用(yòng)定位(精度)≤0.001°的(de)★≥ε高(gāo)精度伺服雲台。同時(shí)雲" <台的(de)絕對(duì)角度定位是(shì∏'↑σ)簡化(huà)工(gōng)作(zuò)÷♦的(de)一(yī)大(dà)重要(yào)步驟,應做 ←ε•(zuò)到(dào)與GIS系統的(de)聯動集成;
5、實際監控→環境應該說(shuō)是(shì)比較惡劣的(de),因此選擇的(de)雲台、♠¥Ωδ防護罩應該具有(yǒu)防水(shuǐ)、≤π±防塵、耐鹽的(de)能(néng)力,考慮到(dào)氣候原因,因此雲台要(yào)具¶≤有(yǒu)較強的(de)抗風(fēng)能(néng)≈↔×力。;
&n€•bsp; 6、當前高(gāo)空(kōng)了(le)望環境尚未建立,© ☆₩但(dàn)是(shì)整個(gè)系統和(hé)其它環境的(de)整合是(shì)必須的✘§(de),因此我們選擇的(de)雲台攝像機(jī)必須有γ≠(yǒu)足夠的(de)附件(jiàn)或者解決方案和(hé)各類矩 ±≤←陣、NVR或者數(shù)字編解碼設備進行(xíng)連接,以獲得(de)各種Ωλ各樣豐富的(de)控制(zhì)和(hé)管理(lǐ)手段。
從(cóng)而為(wèi)我們的(de)産品選型提供了(le)一(yī)個(gè)重'≠®要(yào)的(de)依據。
1、晝夜成像功能(néng)
₽∑£<; 可(kě)見(jiàn)光(guāng)成像系統的(de)彩色模式非常适合天氣晴朗、能(né₹♦♦ng)見(jiàn)度良好(hǎo)的(de)狀況βσ™下(xià)的(de)觀察監視(shì)識别;黑(hēi)白(bái★↓)模式則具有(yǒu)優良的(de)透霧性能(néng)和(hé)較高(gāo)的(de)視(φ₹shì)頻(pín)分(fēn)辨率,在霧天的>δσ(de)情況下(xià)優點非常明(míng)顯;紅(hóng)外(wài)熱÷α(rè)成像無論晝夜均能(néng)輕松發現(xiàn)與環境有(yǒu)溫差的(d'☆→ e)物(wù)體(tǐ),對(duì)飛(fēi)機(jī)、車(c€hē)輛(liàng)等物(wù)體(tǐ)以及夜間(jiān)侵入者均能(néng)有(∑©≥yǒu)效發現(xiàn);
2、具有(yǒu)手動搜索、捕獲和(hé→♠)自(zì)動跟蹤目标的(de)功能(néng)
該系統操作(• ∑zuò)十分(fēn)方便。通(tōng)過手動操縱單杆可(kě)以在不(bù)同的(de)轉×β速下(xià)對(duì)空(kōng)中目标進行(xíng)搜索、觀察和(hé)監視(≠→σshì);采用(yòng)先進的(de)圖像處理(lǐ)和(hé)識别技(jì)術(✔πshù)、目标自(zì)動跟蹤技(jì)術(shù),使要(yà∏♠o)求跟蹤的(de)目标保持在電(diàn)視(shì)視(shì)場(∞★♠chǎng)中心。
3、具有(yǒu)良好(hǎo)的(de)視(shì)軸穩定功能(néng)
光(guāngφε)電(diàn)指向器(qì)采用(yòng)≈γ球形結構,具有(yǒu)風(fēng)阻小(xiǎo),抗風(∏¥✘fēng)能(néng)力強的(de)優點;采用(yòng)陀螺穩定系統€©♠能(néng)夠有(yǒu)效地(dì)隔離(lí)因γ§ 強風(fēng)造成的(de)安裝平台搖擺,從(cóng)而保持光(guāng)電(dià↕<n)攝像系統的(de)穩定,得(de)到(dào)清晰、穩定的(de)圖像,而↔♣♥∏且保證目标圖像始終在電(diàn)視(shì↕β≈∑)屏幕上(shàng)而不(bù)丢失。
4、具有(yǒu)雷達引導跟蹤功能(néng)
通(σγtōng)過接入雷達系統的(de)引導信号,實現(xiàn)雷達與光(guāng'•×)電(diàn)的(de)聯動,充分(fēn)發揮雷達作(zuò)用(yòng)距離(lí)遠(y±§≤λuǎn)、光(guāng)電(diàn)系統成像直觀的(de)優點;
5、具有(yǒu)電(diàn)動變倍、自(zì)動調焦等光(guāng)學參數(shù)調整∑≠功能(néng)
注:如(rú)了(le)解詳細方案、視(shì)頻(pín)等,請(qǐng)與技↑£$≠(jì)術(shù)聯系。
 航道(dào)安全監控預警系統的(de)設計(jì)與應用(y↕∞òng)
航道(dào)安全監控預警系統的(de)設計(jì)與應用(y↕∞òng) 水(shuǐ)庫大(dà)壩安全晝夜遠(yuǎ®£$n)程監控系統
水(shuǐ)庫大(dà)壩安全晝夜遠(yuǎ®£$n)程監控系統 海(hǎi)事(shì)監控系統為(wèi)我國(guó)海(hǎi↕)上(shàng)安全保駕護航
海(hǎi)事(shì)監控系統為(wèi)我國(guó)海(hǎi↕)上(shàng)安全保駕護航 遠(yuǎn)距離(lí)海(hǎi)島監控系統—讓祖國(guó)♠"π的(de)海(hǎi)島更安全
遠(yuǎn)距離(lí)海(hǎi)島監控系統—讓祖國(guó)♠"π的(de)海(hǎi)島更安全